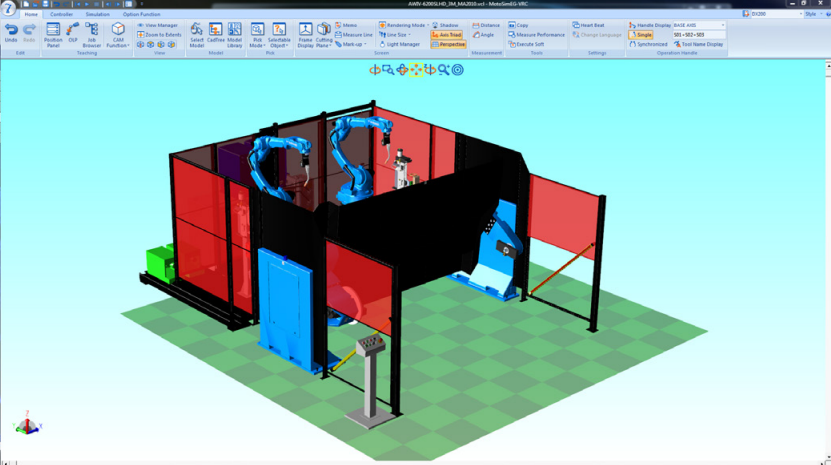
Este curso oferece formação completa que une programação offline (OLP) à operação prática de células robotizadas de soldagem. O participante desenvolve, simula e valida células no software MotoSim EG-VRC e aplica os conhecimentos diretamente no robô real, com foco em processos de solda a arco.
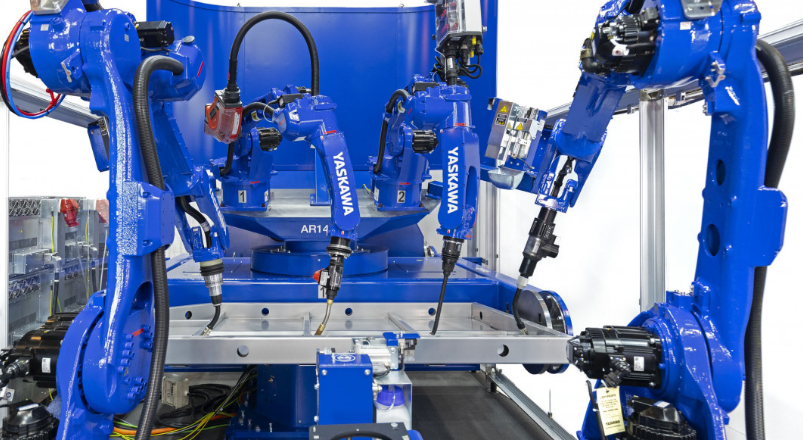
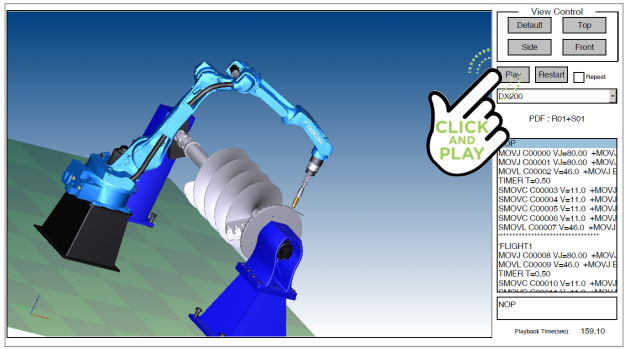
O treinamento adota abordagem teórico-prática fundamentada na vivência industrial. Através do Virtual Programming Pendant (VPP), o aluno pratica em ambiente digital equivalente ao controlador real (NX100, DX100, DX200 e YRC1000). A etapa prática envolve manipulação direta do robô de solda, com calibração de tocha, ajuste de trajetórias e configuração dos parâmetros no "chão de fábrica".
Capacitar profissionais para:
Formação híbrida com aulas teóricas e simulações online síncronas, seguidas de módulos práticos presenciais (in company ou em centro de treinamento). Utiliza notebooks com MotoSim EG-VRC e células reais de soldagem com controladores Yaskawa. A carga horária total é de 20 horas, com avaliação prática e teórica para emissão de certificado.
Engenheiros de processo, analistas de engenharia, robotistas, técnicos de soldagem e operadores de robô que buscam otimizar processos e reduzir custos de retrabalho.